ROGO Ag is a provider of automated soil sampling for agriculture. An application specific robot quickly and precisely gathers samples of soil from a farm field according to predefined criteria. Quality of data, repeatability and efficiency are maximized over manual soil sampling methods.
Watch a video of the robot in action.

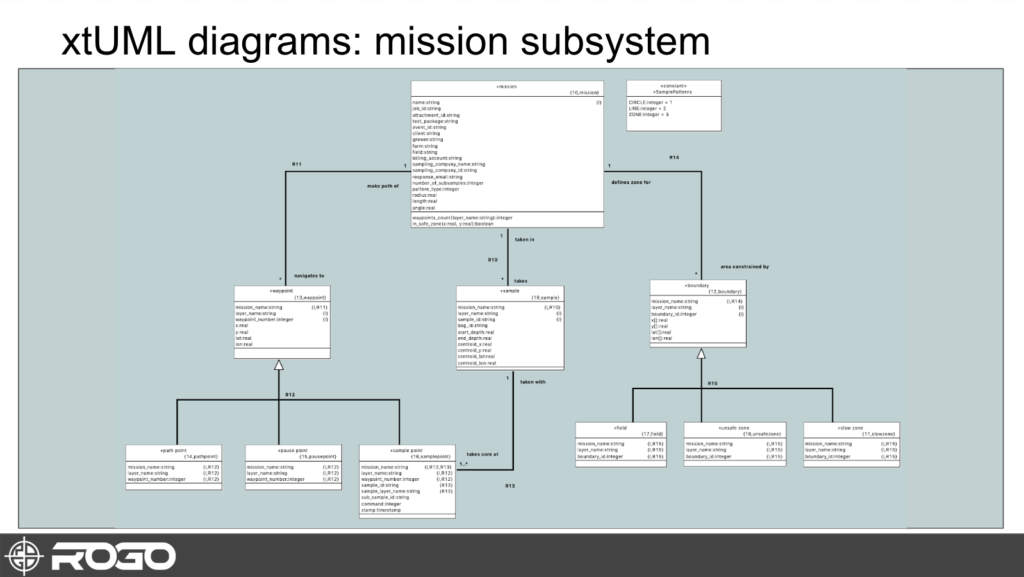
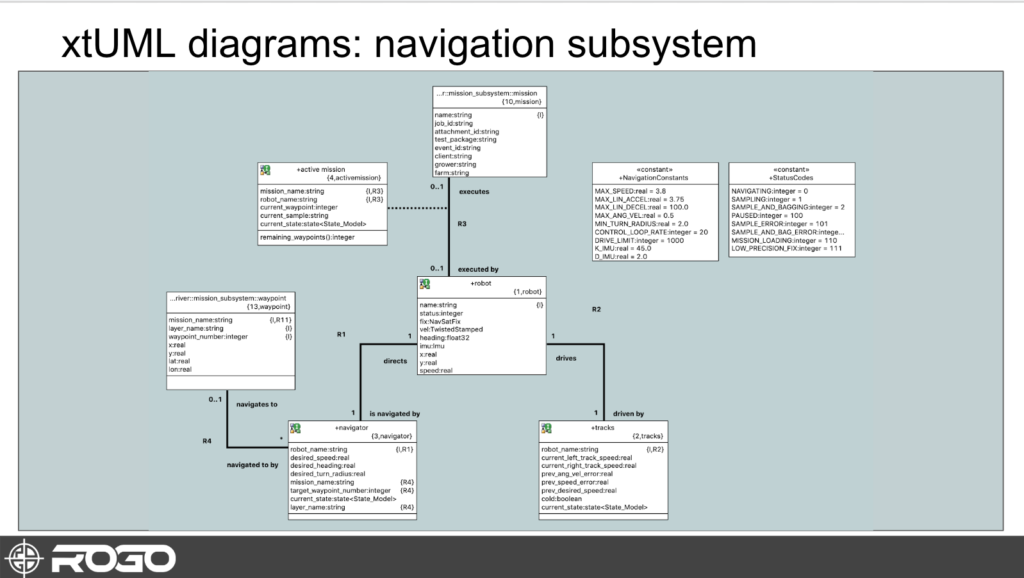
xtUML serves in the enhanced GPS navigation, inertial guidance and robotic control sequencing.

xtUML models of the ‘mission’ and ‘navigation’ subsystems are shown.
Another model of the model-based model compiler which generates ‘ROS-aware Python’ provides a Shlaer-Mellor compliant software architecture.
